赋予完整手指
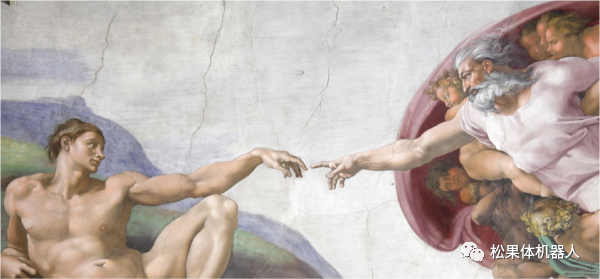
米开朗基罗于1511年至1512年在西斯廷礼拜堂上绘制的“创造亚当”,这是人类史上最著名的壁画之一,每个人对其有着不同的关注和理解。我最关注的就是“神与人即将触碰的手指”,一个技术男的理解是“造物主在验收他最精美作品最重要的一项功能——指尖触觉”。触碰的一刹那,人类将被赐予接近神和感受世界的最深刻方式——触觉。这种触碰的感觉,即使在现今世界仍不能进行完整的科学描述。
人类的“触觉”由两个主要亚模式组成,即皮肤触觉和动觉,以感觉输入部位为特征。指尖触觉属于皮肤触觉,主要指通过大量不同刺激的受体处理外部刺激的时空感知,例如压力/振动的机械感受器、温度的热感受器和疼痛损伤的伤害感受器,这些感受器以不同的密度分布在全身,据估计,成人每个区域的机械感受器数量在指尖为241个,手掌为58个。这种受体器官被称为梅斯纳小体(梅氏小体,Meissner corpuscle),科学家发现梅氏小体末端器官中USH2A(一种具有极大胞外域的跨膜蛋白)的缺失降低了机械感受器的敏感性以及振动知觉。
手指是人类器官中同时具备执行器和传感器的最好器官。执行器方面,以肩为原点到1个手指尖有11个自由度;传感器方面,有着241个机械感受体及其他各种触觉感受体。可以说造物主赐予了人类最完美的手指。而人类在发展的过程中,也想创造出完美的手指,并赐予自己的机器人,并最终完成手指触碰的瞬间。这是所有机器人工程师的梦想。
但是目前为止,人类已经可以制造出11自由度以上的指尖,并且可以通过6维力传感器赋予了几个大关节的动感。手指的执行器与传感器相比,已经走远很多。对于传感器,像机械触觉方面,人类只有少数的科研成果,并且其他几种触觉传感研究更少。人类在制造完美手指之前,先要制造出完整手指,完整手指至少需要具备以下三点。
第一,手指在具备“执行”能力必须同时具备“感知”能力。可以先以人类为说明,有这样的一个实验:先麻醉一组志愿者手上的皮肤,然后观察他们的行为,发现即使他们能看到自己在做什么,也很难保持对物体的稳定抓握。当“触觉”丧失时,动作变得不准确和不稳定。在机械臂上也得到类似的验证,没有触觉的机械臂很难做出自适应的动作。
第二,传感器和执行器必须具有高度的空间重合性,需要同时接触到操控物体。曾经人们在机械臂的腕部增加摄像头,让机器人意识到环境空间,这样减少与人的碰撞,从而增加了人机交互的安全性。但是对于精细动作,例如,手指深入孔洞内,出现了遮挡,视觉将失效。这样的任务只能通过触觉完成,所以这必然要求机械手指的执行器和传感器在空间上完全重合。
第三,其性能要超过人类的能力。例如,人类手指的空间敏锐度为3mm(可以区分出空间距离3mm的2个不同点)、人类躯干的空间灵敏度为20-30mm。现有大部分的触觉传感器只能做到10-30mm的空间灵敏度,而最新技术的触觉传感器可以做到 0.1mm的空间灵敏度。另外完整手指在力学性能指标上也需要超过人类的能力,需要有精细的近端的应力场分布结果,而不是简单的远端的6维力。
当具备了以上三点,可以称人类创造出完整手指。医生配备了完整手指,可以用它通过遥操作技术做出高超手术,手术中每个细微的反力都及时的传递给医生,使其做出最正确的治疗;护士拥有了完整手指,可以用它替代核酸采集工作,每一次对咽腭部位轻柔的触碰,都由高灵敏的位置信息进行把控;工程师操控着完整手指,在运动与感受的平衡中完成每一项精细而准确的工作、建造着美好世界。
每一位劳动者都希望使用灵巧的机械臂,而每一个机械臂都在期盼着被赋予完整手指。
写在松果体末端触觉感知产品FINGER发布时刻。
作者简介:
刘维甫 松果体机器人首席科学家
北大理学博士,科技部重点研发课题负责人,北京市科技奖获得者,动捕、视觉、VR专家。